
1. წრიული ქსოვის მანქანების ტექნოლოგიის დანერგვა
1. წრიული ქსოვის აპარატის მოკლე შესავალი
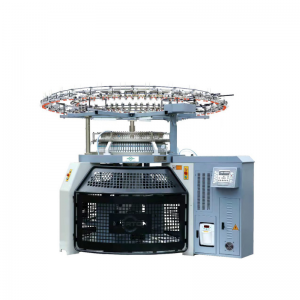
წრიული ქსოვის ქსოვის მანქანა (როგორც ნაჩვენებია ნახაზზე 1) არის მოწყობილობა, რომელიც ბამბის ძაფს ატარებს ტუბულურ ქსოვილში. იგი ძირითადად გამოიყენება სხვადასხვა ტიპის ნაქსოვი ქსოვილების, მაისურის ქსოვილების, სხვადასხვა ნიმუშის ქსოვილების ხვრელებით და ა.შ., სტრუქტურის თანახმად, იგი შეიძლება დაიყოს ერთჯერადი ჯერსის წრიული ქსოვის აპარატში და ორმაგი ჯერსის წრიული ქსოვის აპარატში, რომლებიც ფართოდ გამოიყენება ტექსტილის ინდუსტრიაში.
 2. პროცესის მოთხოვნები
2. პროცესის მოთხოვნები
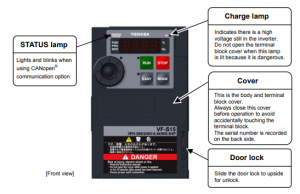
(1) ინვერტორს უნდა ჰქონდეს ძლიერი გარემოსდაცვითი წინააღმდეგობა, რადგან ადგილზე სამუშაო გარემოს ტემპერატურა შედარებით მაღალია, ხოლო ბამბის მატყლი ადვილად შეიძლება გამოიწვიოს გაგრილების გულშემატკივართა გაჩერებას და დაზიანებას, ხოლო გამაგრილებელი ხვრელები დაბლოკილია.
(2) საჭიროა მოქნილი ინჩის ოპერაციის ფუნქცია. ინჩის ღილაკები დამონტაჟებულია აღჭურვილობის ბევრ ადგილას, ხოლო ინვერტორს მოეთხოვება სწრაფად რეაგირება.
(3) სიჩქარის კონტროლში საჭიროა სამი სიჩქარე. ერთი არის ინჩის ოპერაციის სიჩქარე, ჩვეულებრივ, დაახლოებით 6Hz; სხვა არის ნორმალური ქსოვის სიჩქარე, ყველაზე მაღალი სიხშირით 70 ჰც -მდე; მესამე არის დაბალი სიჩქარით შეკრების ოპერაცია, რომელიც მოითხოვს სიხშირე დაახლოებით 20Hz.
(4) წრიული ქსოვის აპარატის მუშაობის დროს, საავტომობილო შეცვლა და როტაცია აბსოლუტურად აკრძალულია, წინააღმდეგ შემთხვევაში ნემსის საწოლის ნემსები მოხრილი ან გატეხილი იქნება. თუ წრიული ქსოვის მანქანა იყენებს ერთფაზიანი ტარების, ეს არ განიხილება. თუ სისტემა ბრუნავს წინ და გადააკეთებს, ეს მთლიანად დამოკიდებულია ძრავის წინ და საპირისპირო როტაციაზე. ერთის მხრივ, მას უნდა შეეძლოს უკმაყოფილო როტაციის აკრძალვა, ხოლო მეორეს მხრივ, მას სჭირდება DC დამუხრუჭების დაყენება როტაციის აღმოსაფხვრელად.
3. შესრულების მოთხოვნები
ქსელის დროს დატვირთვა მძიმეა, ხოლო ინჩი/დაწყების პროცესი უნდა იყოს სწრაფი, რაც მოითხოვს ინვერტორს ჰქონდეს დაბალი სიხშირე, დიდი ბრუნვის და სწრაფი რეაგირების სიჩქარე. სიხშირის გადამყვანი იღებს ვექტორული კონტროლის რეჟიმს, რომ გააუმჯობესოს ძრავის სიჩქარის სტაბილიზაციის სიზუსტე და დაბალი სიხშირის ბრუნვის გამომავალი.
4. კონტროლის გაყვანილობა
წრიული ქსოვის ქსოვის აპარატის საკონტროლო ნაწილი იღებს მიკროკონტროლერს ან PLC + ადამიანის მანქანას ინტერფეისის კონტროლს. სიხშირის გადამყვანი კონტროლდება ტერმინალებით, რომ დაიწყოს და შეაჩეროს, ხოლო სიხშირე მოცემულია ანალოგური რაოდენობით ან მრავალსაფეხურიანი სიხშირის პარამეტრით.
ძირითადად, მრავალ სიჩქარიანი კონტროლისთვის არსებობს ორი საკონტროლო სქემა. ერთი არის ანალოგის გამოყენება სიხშირის დასადგენად. იქნება ეს სირბილი, ან სიჩქარით და დაბალი სიჩქარით ოპერაცია, ანალოგური სიგნალი და ოპერაციული ინსტრუქციები მოცემულია საკონტროლო სისტემის მიერ; სხვა არის სიხშირის გადამყვანი. ინტეგრირებული მრავალსაფეხურიანი სიხშირის პარამეტრი, საკონტროლო სისტემა იძლევა მრავალსაფეხურიანი სიხშირის გადართვის სიგნალს, სირბილი უზრუნველყოფს თავად ინვერტორს, ხოლო მაღალსიჩქარიანი ქსოვის სიხშირე მოცემულია ინვერტორული ანალოგური რაოდენობით ან ციფრული პარამეტრით.
2. ადგილზე მოთხოვნები და ექსპლუატაციის გეგმა
(1) ადგილზე მოთხოვნები
წრიული ქსოვის მანქანების ინდუსტრიას აქვს შედარებით მარტივი მოთხოვნები ინვერტორული კონტროლის ფუნქციისთვის. საერთოდ, იგი უკავშირდება ტერმინალებს, რომ გააკონტროლონ დაწყება და გაჩერება, მოცემულია ანალოგური სიხშირე, ან მრავალ სიჩქარით გამოიყენება სიხშირის დასადგენად. ინჩის ან დაბალი სიჩქარით ოპერაცია საჭიროა სწრაფი, ამიტომ ინვერტორს მოეთხოვება ძრავის კონტროლი, რათა წარმოქმნას დაბალი სიხშირის ბრუნვის დაბალი სიხშირე. საერთოდ, წრიული ქსოვის აპარატების გამოყენებისას, სიხშირის გადამყვანი V/F რეჟიმი საკმარისია.
(2) გამართვის სქემა სქემა, რომელსაც ჩვენ ვიღებთ
3. პარამეტრების გამართვის პარამეტრები და ინსტრუქციები
1. გაყვანილობის დიაგრამა
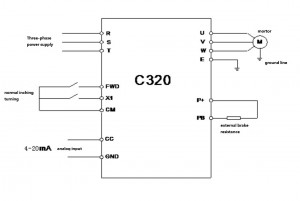
2. გამართვის პარამეტრის პარამეტრი
(1) F0.0 = 0 VF რეჟიმი
(2) F0.1 = 6 სიხშირის შეყვანის არხი გარე მიმდინარე სიგნალი
(3) F0.4 = 0001 გარე ტერმინალის კონტროლი
(4) F0.6 = 0010 საპირისპირო როტაციის პრევენცია ძალაშია
(5) F0.10 = 5 აჩქარების დრო 5S
(6) F0.11 = 0.8 შენელებული დრო 0.8 სთ
(7) F0.16 = 6 გადამზიდავი სიხშირე 6K
(8) F1.1 = 4 Torque Boost 4
(9) F3.0 = 6 მითითებული X1 გადასასვლელი სირბილი
(10) F4.10 = 6 დააყენეთ სირბილი სიხშირე 6Hz
(11) F4.21 = 3.5 დააყენეთ სირბილის აჩქარების დრო 3.5 წმ -მდე
(12) F4.22 = 1.5 ადგენს სირბილი
გამართვის შენიშვნები
(1) პირველი, სირბილით, რომ დადგინდეს ძრავის მიმართულება.
(2) სირბილის დროს ვიბრაციისა და ნელი რეაგირების პრობლემებთან დაკავშირებით, სირბილის აჩქარება და შემცირების დრო უნდა შეცვალოს მოთხოვნების შესაბამისად.
(3) დაბალი სიხშირის ბრუნვის გაუმჯობესება შესაძლებელია გადამზიდავი ტალღის და ბრუნვის გამაძლიერებლის რეგულირებით.
(4) ბამბის მატყლი ბლოკავს ჰაერის სადინარს და გულშემატკივართა სადგომებს, რაც იწვევს ინვერტორული სითბოს ცუდად დაშლას. ეს სიტუაცია ხშირად ხდება. დღეისათვის, გენერალური ინვერტორი გამოტოვებს თერმული განგაშის და შემდეგ ხელით ხსნის ჰაერის სადინარში ხაზს, სანამ გააგრძელებს მის გამოყენებას.
პოსტის დრო: SEP-08-2023